我が家の適当環境でもそこそこ撮れた気がしましたのでその2続編です。
M42 オリオン大星雲は年に1、2回チャレンジするのですが、うまく撮れず、すぐに諦めるということを繰り返してます。これを書いてる2023年は夏から冬に至るまでずーっと木星を撮り続けるというルーチンを繰り返してたので、オリオン座が拝めるようになったもののなかなか M42 を撮影しようとする気も起こらずで、ようやく重い腰を上げて今シーズン初のチャレンジとなりました。
都内の住宅街からの撮影になりますが、最近は光害を物ともせずに素晴らしい撮影をされる方々が沢山いるので、それぐらいのハンディは特殊なことではなくなってきたのかなと思います。




これが成果です。その1の頃に比べて格段によくなりました!型落ちのデジイチと普段使いのズームレンズでの撮影です。このセットでこの環境の結果なら悪く無い、ですよね?トラペジウムが潰れてるとか、そいういうのはおいといて。
ところでそろそろ Nikon のミラーレス欲しい。。。使い道無いんだけど。
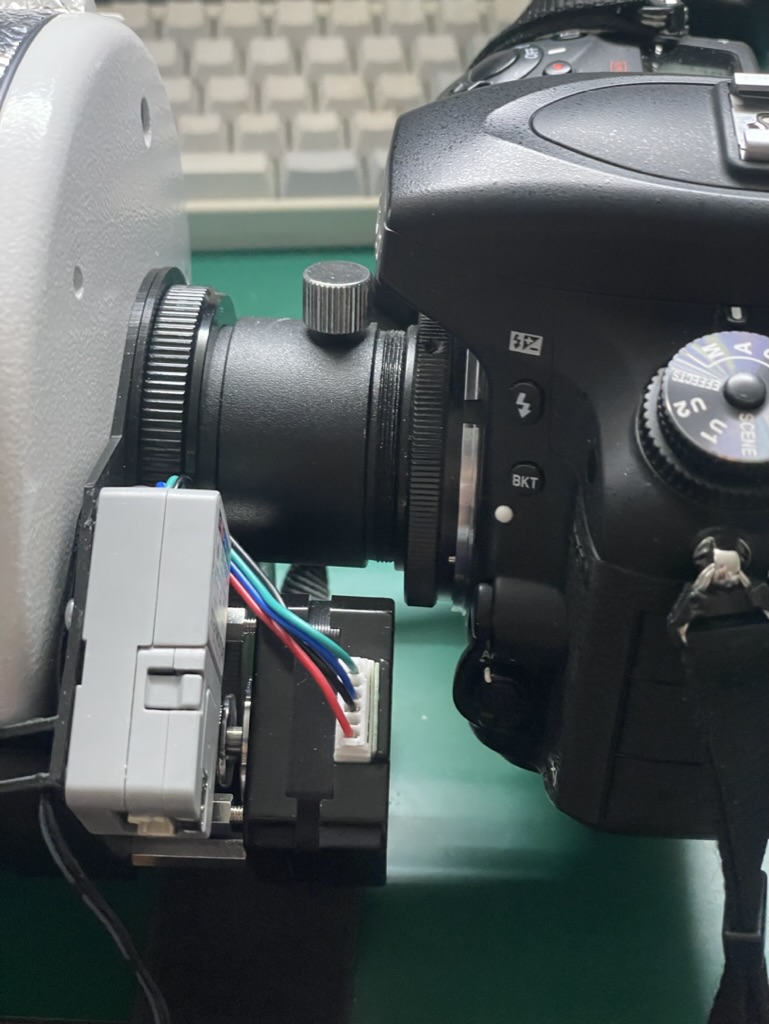
さて機材は、
のみです。
流石に赤道儀は必要でした。以前経緯台モードでも撮影は試してますが、像が回転していってしまうので真ん中以外使えないのと少し長めの露出でも星が流れにくいので赤道儀あるといいです。また D750 はリング式三脚座を使って直接 AZ-GTi に載せてます。カメラはもちろんノーマル。無改造。なんにもいじってないです。電源は今回の撮影枚数程度なら多分バッテリーでも持つのですが、念の為外部電源繋いでます。
ちなみにこのズームレンズ、広角から望遠まで幅広い画角がコンパクトなサイズで使えて普段使いに便利なんです。しかしこれで最初に M31 を撮ってみた時には DSO にズームレンズなんて使えないんじゃ?と思ってました。
撮影方法は、PC に USB ケーブルで接続し、Windows の digiCamControl というソフトで、連続撮影して PC に画像を保存しましたが、他のソフトでもいいし、なんなら PC に接続する必要すら無いと思います。digiCamControl を使ってる理由は、ピントを PC から制御して、結果が Live View で確認できること、撮影すると PC に画像が転送できるので都度都度様子がチェックできることに使用してるだけで、ほったらかしでの撮影なので初期設定さえ決めてしまえば PC は不要と言えます。あと digiCamControl は D750 が制御できて(古めの機種なので相性悪いソフトもある)かつ、使い方が簡単だからというのもありました。Astro Photography Tool とかも持ってはいるんですが、digiCamControl はそれに比べると簡単なので。ちなみに PC 無し環境の場合、カメラにタイムラプス機能みたいなので、自動で複数枚数撮影できる機能あればそれでOKかと思います。
ところで今回は赤道儀(AZ-GTi の赤道儀モード)の設定はかなりいい加減でした。2スターアライメントにしたかったんですが、1スターしかちょうど良い星がなかったので(アライメント候補の星が二つ目は知らなくて暗めだった)1スターアライメントでかつ、極軸合わせもしてないというだいぶいい加減な設定でした。というのも露出時間はそんなに長くできないので、多少ズレてもわからないよねというところでガッツリは合わせこみませんでした。ちゃんと合わせた方が更にいいとは思います。もちろん最初に北に向けておくとか水平はちゃんと取るということはやってますけど、精度が高いかといえばそんなこともなく。
ちなみにアライメントは PC に繋いで PC の画面にライブビューを表示させながら行ってます。PC に繋ぐと楽な姿勢で大画面で調整できるのは便利。外部モニターでもいいでしょうね。
カメラの設定は以下の通りです。
- ISO1600
- Manual mode
- f11
- 露出時間 30sec (雑な赤道儀運用で 300mm でも撮影した星が流れないという基準)
- 長秒時ノイズ低減 OFF
- 好感度ノイズ低減 OFF
- VR ON (VR 機能があるレンズは OFF にすることをおすすめ単に忘れただけ)
主なところはこんなところです。これがベストというわけではなく(もしかしたらベストなのかもしれませんが)、とりあえず今回はこの設定で撮ってみた、ということになります。ISO 感度は低めで、あとは露出時間 30sec をキープできるようかつ撮影画像が飽和しないよう絞りを絞っちゃったという(アリか?)、、
これで連続で 200 枚撮影し(最後の方雲が出てきたので 17枚ほど捨て)、キャップをして外気温のままダークを30枚、そのままシャッター速度を最高にして(D750 の場合1/4000)バイアスを30枚、PC の画面にグレーを出して、レンズを押し付けて、ヒストグラムが中央よりやや左になる程度で 30枚のフラットを撮りました。
撮った画像は Siril で処理して完了です。そのあとは何にもいじって無いです。以前はスタックと炙り出しに DSS (DeepSkyStacker) を使ってたのですが、Siril にしました。今回は総露出時間(撮影枚数x露出時間)もそこそこあったのですが、やはり Siril でのスタック以降の処理が効いてるような気がします。
Siril の使い方については ドキュメントの日本語訳を作ってくれた方がいて(その方のブログからも辿れます)、特に SIRIL の使い方スクリプト編が役に立ちました。それに従って処理しだけです。ダーク、バイアス、フラットなどの撮影方法についても前半に説明あります。とても参考になりました。ありがとうございます。
参考までに撮って出し。左が撮影開始時、右が撮影終了時。時間が遅くなるにつれて天頂近くになるのと周囲が暗くなるので撮影終了時の方が黒っぽいですね。しかも極軸合わせすらやってないので、1.5h 後には M42 がだいぶずれているというのがみてとれますね。。 orz
こんな画像でも Siril で星を抽出して、自動的に重ね合わせてくれるので全然問題無しです。あ、気を付ける点としてはピントをちゃんと合わせること。これでだいぶ違います。バーティノフマスクというのを使ってきちんと合わせられればいいのかもしれませんが、PC の画面見て、可能な限り拡大した状態で星の大きさが最も小さくなるようにピントを合わせました。


結論
なんか赤道儀あれば M42 は都内からでも普通のカメラとレンズでそこそこ写る。
というのを感じました。あと赤道儀がとは言ったもののガッツリ合わせこむこともなく適当でよかったというのもポイントです。
ところでM42 はまだいいんですが、都会だと他の天体を導入しようとすると撮影してみるまで導入できてるかよくわからないんで、アライメントがあり、自動導入ができる AZ-GTi は改めて便利だなと思いました。気合い?入れると極軸合わせもできるようだし(笑)新品買うと安くはないですが、中古ならそこそこの値段で出回ってるようです。軽い望遠鏡も載せられるので(そっちが本命ですが)、おすすめです。
しかし、単に綺麗な星雲、星団、銀河 (DSO: Deep Sky Object) を自宅で撮りたいんだったら SeeStar S50 買うというのが選択肢の一つになってきました。下手に望遠鏡などなどに投資することを考えたらこれ一台でそこそこの画像得られますし、特別な撮影技術もいらないです。ただし撮った後の画像処理は遊ぶ余地はあるようです。でも DSO を撮影するだけなら非常につまらない気がします。だってこれらの天体って変化ないので、誰が撮っても同じ程度の画像得られるなら写真見るのと変わらないんじゃないかなと。
そう考えると自宅での DSO 撮影ってどこに向かえばいいんだろ?
という疑問が沸々と。すっごい画像を狙うなら機材もさることながら撮影場所も変えないとなので両方ともちょっと自分には難しいかなと。ま、現状の機材で場所で楽しもうかな。
ということで最近は刻々と変化が見られる惑星や太陽の方が魅力を感じてきました。



























.png)