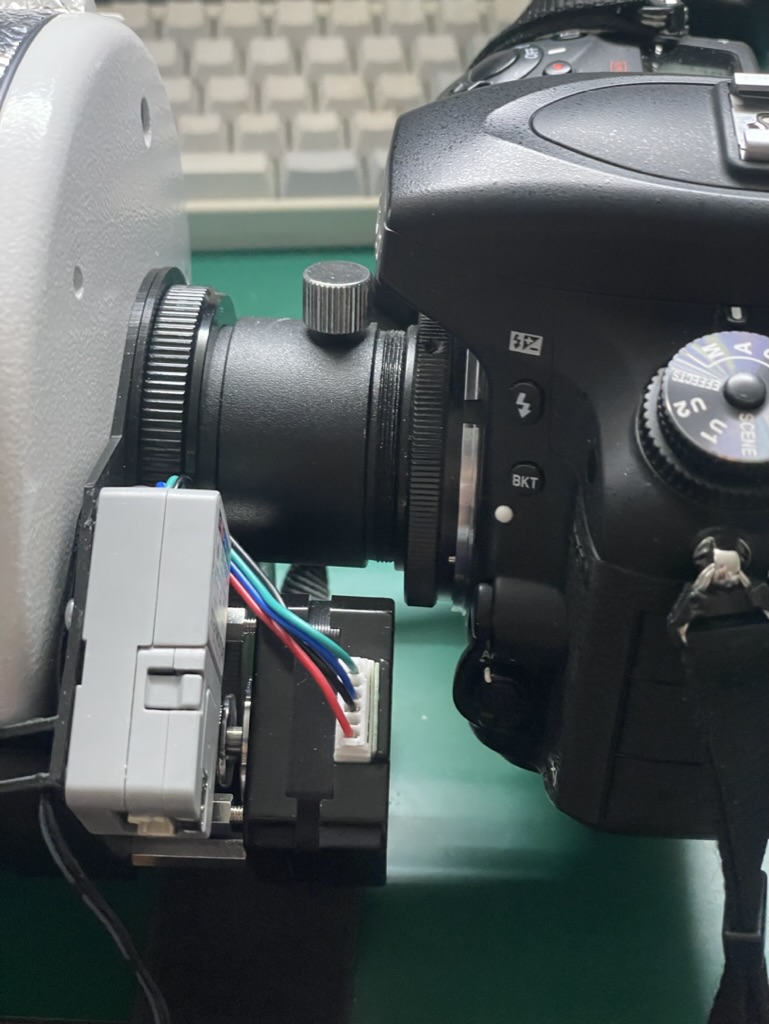
MAK127に EAF などのフォーカサーを取り付けている猛者もいるようですが作るの好きなんで作ってみました。そもそも MAK127 は素直に電動フォーカサー付けるところ無いんだよなぁ。ぶつぶつ。
ところで我が MAK127用フォーカサーもついに Ver.4。ハード的には最終版。。だと思ってます。Ver.3 に比べ小型軽量化に成功です(当社比)!PC との接続はUSB-C ケーブルにて接続してください。

これまではアリガタにアリミゾクランプをつかってモータを取り付けてたのですが、今回は 3D プリンターでモータを載せる土台を作って接眼部にはめ込む作りにしました。

これがベース

リングは単なる薄い輪です

スペーサー(追加になりました)
です。スペーサーはサポーター有りでプリントせざるを得ない形状ですのでご注意を。
そのほかに必要なものは以下。
- バイポーラステッピングモーター SM-42BYG011 x1
- タイミングベルト6mm幅182mm周囲長 x1
- プーリー5mmボア6mm幅 x1
- プーリー12mmボア6mm幅 60T x1
- ATOM STEPMOTOR Kit x1
- 六角スペーサー 20mm x 3
- なべ小ネジ M3 5mm x5
- なべ小ネジ M3 35mm x1 (+ナット x1)
- DCジャック付きケーブル x1
- DC12V 電源 x1
以上です。
バイポーラステッピングモーターは当初小型のものを使ってみましたがトルクが足りないので、リンク先のものを使うことにしました。12V のモータで、これ以上のトルクならOKだと思います。ステップ角とかも同じである必要はないです。ただ、3Dプリンターで作る部品の形状を考えると、モータのネジ穴の間隔が同じである必要はあるかなと。
電源も 12V で 1A 程度かそれ以上あれば十分です。
あとちょっと日本での入手性が怪しくなりそうなのが ATOM STEPMOTOR Kit でしょうか。スイッチサイエンスさんでは在庫限りの扱いのようです。海外発送でよければ製造元の M5Stack のオンラインストアから入手できると思います。
タイミングベルトはプーリーや取り付け位置の兼ね合いで他の長さを選んでも良いかもしれません。
組み立て
MAK127 のフォーカスノブのプーリーへの交換は、Ver.3 の投稿を参考にしてください。
また一部古い写真つかっていて、最終盤とは違うところがあるのはご勘弁ください。
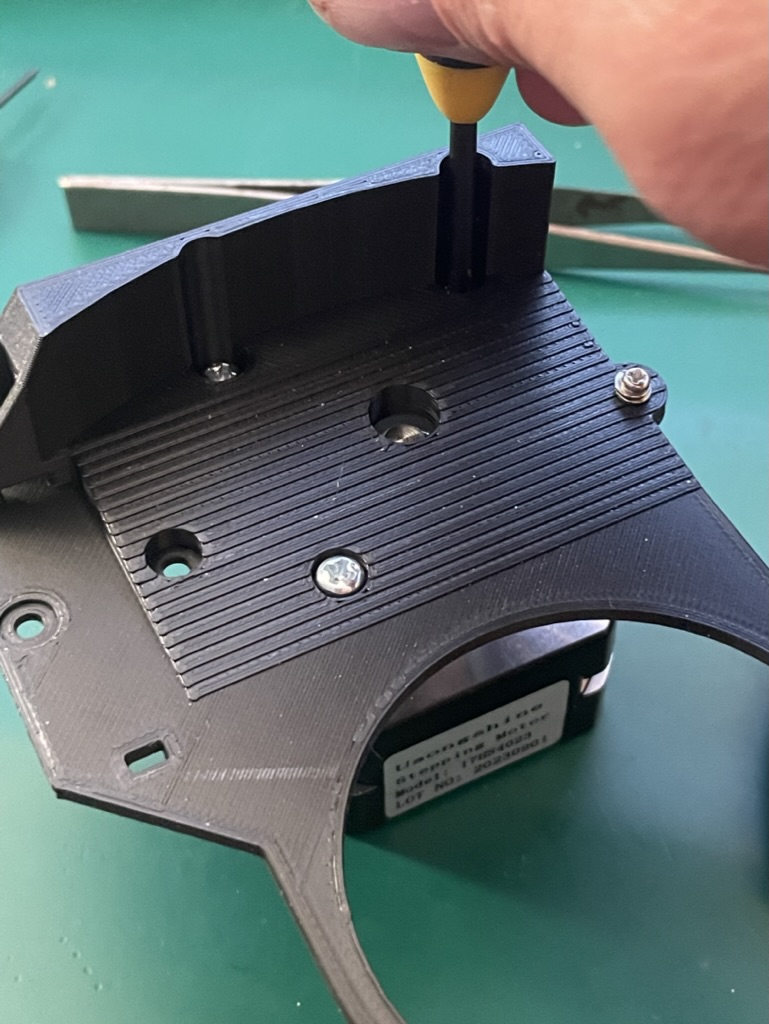
1. モータをベースに取り付ける
モータにある穴に六角スペーサーをねじこんでおきます(多分完全にねじ込めないで少し浮いた感じになる)。また小さいプーリーをモータに六角レンチでとりつけておきます(後で取り付け位置は修正する)。ネジで取り付ける前にタイミングベルトを挟んでおきます。それからモータをベースに M3 のネジ3本で取り付けます。

モータに付属してるケーブルを適当な長さで切り、ATOM STEPMOTOR Kit にねじ止めします。あとでモータ電流を調整するので、蓋はまだ閉めなくてよい。また ATOM lite (写真右上の四角いやつ)は外れないよう付属のネジでモータドライバの載ってるケースとねじ止めしておいた方が良いかも。


3. ATOM STEPMOTOR Kit をベースに取り付ける
M3 のネジ2本で取り付ける。

4. DC ジャックケーブルを接続
ベースの穴を通して、ATOM STEPMOTOR Kit にねじ止めする。ケーブルの太さと穴のサイズが合わなかったら適当にグリグリしてください。


プーリーを取り付ける前にスペーサーを入れておく

M3 35mm のネジをねじ込んでおく

6. ベースを MAK127 に取り付ける
タイミングベルトは結構タイトです。プーリーに引っ掛けながら穴を取り外した接眼部に通します。そして薄いリングを重ねます。接眼部を戻し、ねじ込みます。この時きちんと真ん中でねじ込めるように。そしてしっかりねじこんだときに接眼部が回転せず固定されていること。奥までねじ込んでも接眼部が回ってしまう場合は、ベースの穴の位置と接眼部がちょうど真ん中になっていないか、3Dプリンターの違いで出力されたベースやリングの厚みが大きくて回るようになるケースが考えられます。薄いリングの厚みを変えてみてください。



まずプーリーの高さを揃える。その後にベルトの張りをプーリーの下に入れたスペーサーのネジで調整します。この機構でようやくベルトの調整幅が広がりました。ベルトの長さが多少異なってもこれで吸収できるかと。ちなみにベルトは張りすぎるとモータの軸が回転しなくなります(脱調という)。硬すぎずゆるすぎずで調整してみてください。

以上で組み立てはおしまいです。
以上で組み立てはおしまいです。
ソフトウェア
動作させるには ATOM STEPMOTOR Kit のためのファームと、それを動かす UI が必要になります。Git にて配布してます。以下のリンクより入手してください。ソースコードはあんまり整理してませんが、、、興味がある方すいません。余計なコードとか転がってたらすいません。
本当は ASCOM 対応にしたいところなのですが、今のところそんなスキルはありません。以前は ASCOM に対応している myFP2ESP を手直しして使ってたのですが、シリアルに対応しなくなってしまったのでやめました。myFP2 の方はまだシリアル対応してるっぽいので、気が向いたら myFP2 を移植し直そうかな。
ATOM STEPMOTOR Kit のファーム
Arduino 形式で書いてます。M5 Stack の ATOM lite の Arduino のビルド環境が必要です。Git に置いてある atom_stepper_ctrl.ino をビルドしてください。
ユーザーインターフェース
用意したファームはシリアルポートにテキストでアクセスできるようにしてます。なので、TeraTerm などのターミナルエミュレータで直接制御することができます。でも使いづらいですよね。そこで Python で GUI を用意しました (atom_focuser4.py)。実行するには customtkinter, pyserial といったライブラリをインストールする必要があります。Windows 向けにはバイナリを用意したので(atom_focuser4.exe)、Python をインストールせずにバイナリを実行することも可能です。ATOM STEPMOTOR Kit の接続されているポートを選択し、Connect のスライドボタンをクリックすれば接続です。-100~+100 のボタンをクリックすればそのステップだけ移動します。マウスが接続されているならホイールのスクロールで Position を増減できます(Shift キーを押しながらスクロールするとステップが変わります)。またカーソルの上下(+Shift)でも Position の増減が可能です。M1, M2 はマークで、スペースキーで M1, スペース+Shift で M2 に現在の Position を保存できます。M1 と M2 の中間に移動したい場合は (M1+M2)/2 のボタンをクリックしてください。また Position の値は直接書き換えて Return キーを押すと指定した値に移動します。
Python 版の方はマウスのスクロールステップを変更できるボタンが用意されています(おまけ)。

興味をもっていただけた酔狂な方のご質問は X の @ttrsato まで。こちらでもいいんですが、気づくのが結構遅いです。
0 件のコメント:
コメントを投稿