ここでは MAK127にステッピングモータを取り付け、モータを動かす ATOMIC ステッピングモータードライバキットを接続する方法を解説します。以下のような物を作ります。

MAK127SP にステーを取り付ける
この工程、一つだけ全工程中最難関の作業があります。他の作業はそれほど大変ではありません。
最難関と言うものの、この工程では以下の写真のようにアリガタプレートの溝を利用して、アルミの中空の棒(アルミチャンネル)を切って、穴を開けてネジで挟んで取り付けるだけ!です(モータは後で取り付けます)。

材料
- アルミチャンネル 8x5.5x1.0 長さ 60cm 以上
- M3x35mm ネジ x2
- M3ナット x2
- M3ワッシャー x2
ここでの材料費は500円以内でしょうか?アルミチャンネルはホームセンターで見つけましたが、モノタロウにもあるようです。リンク張っておきました。
作業
- アルミチャンネルをカットして 26cm x2 本作成する
ホームセンターで500円ぐらいで売っている金鋸などでカットします。
精度は入りません。5mm ぐらいずれても問題ありません。
切った後は怪我しないようにヤスリなどでバリを取っておいた方がいいです。 - アルミチャンネルに 3mm の穴を開ける
穴の位置は端から 5mm、逆側は 75mm 程度。写真のようにネジを通します。
これもそれほど精度は入りません。5mm 程度ずれても大丈夫です。
実はこの工程のどうやって穴を開けるだけが最大の難関です。ドリルがあると簡単なんですが(写真は30年モノのマキタ)。ホームセンターとかで穴開けてくれるサービスがあるなら利用してください。ちなみに二本重ねてテープで止めておいて、一度に穴を開けると位置決めが楽です。写真ではラフなやり方してますが、皆さん怪我にはご注意を。
- アルミチャンネルをアリガタプレートの溝に入れ、ねじ止めする
特に難しいことは無いと思います。指定のネジの長さにするとアリガタプレート からはみ出すことなく、望遠鏡を例えば AZ-GTi に取り付ける時にも干渉しません。逆側も同様です。アルミチャンネルの幅と深さはこの溝に収まれば良いので若干サイズが異なっても問題ありません。望遠鏡を取り付ける際にアルミチャンネルも挟み込まれることになるので、アルミチャンネル自身が外れてしまうという心配はあまり無いかと思います。



モータを取り付ける
モータにブラケットとカプラーを取り付け、MAK127SP のフォーカスノブを取り外し、モータを取り付けます。
材料
- バイポーラステッピングモーター x1
- ステッピングモーター用ブラケット x1
- ミニ金具フラット x2
- M3x20mm x1
- M3ナット x1
- M3蝶ナット x1
- カプラー 5mm - 12mm x1
モータと望遠鏡を繋ぐカプラーを除くと 2000円もしないかと思いますが、カプラーが高い。上記のリンクの部品を合わせると 5000円ぐらいになってしまいます。
ステッピングモーターはバイポーラタイプを選択します。秋月などで見かける四角いタイプで取り付けが楽なブラケットに載るタイプを選ぶと良いと思います。奥行きは邪魔になるのでなるべく薄いものを選んで下さい。またステッピングモーターのケーブルは長めの物が付属しているとケーブルを取り付ける作業が省けます。ただモータドライバキットの脱着を考えるとコネクタタイプを選択しても良いと思います。ここでは200ステップで一周(Step angle 1.8°)の物を選んでいますが、それ以外でも後述する DRV8825 の設定で調整できるので大丈夫だと思います。
カプラーはモータと MAK127SP のフォーカスノブを接続します。大概のステッピングモーターの軸は 5mm で、MAK127SP 側は 12mm になります。先にも書きましたが他の部品と比較し、結構高めですが、サイズに合うカプラーを見つけて下さい。中にはオルダムタイプのようにバラバラになる物もありますが、後述の理由で使えません。写真左がオルダムタイプです。たまたま中古でいただいた物を使っている型番が上記になりますが、他の物でもいいと思います。モータの軸の径と、望遠鏡側の12mm で探してみてください。コチラは試していませんがお安くてサイズ的に使えそうです。

左がオルダムタイプ
ミニ金具フラットですが、後述の通りモータを挟んで取り付けるために使用します。厚みも利用しています。とりあえず3cm以上の長さがあればモータをステーに取り付けられると思います。厚み方向はブラケットで微調整できるので写真程度の厚みぐらいがあれば良いと思います。
作業
- モータに金具を付ける
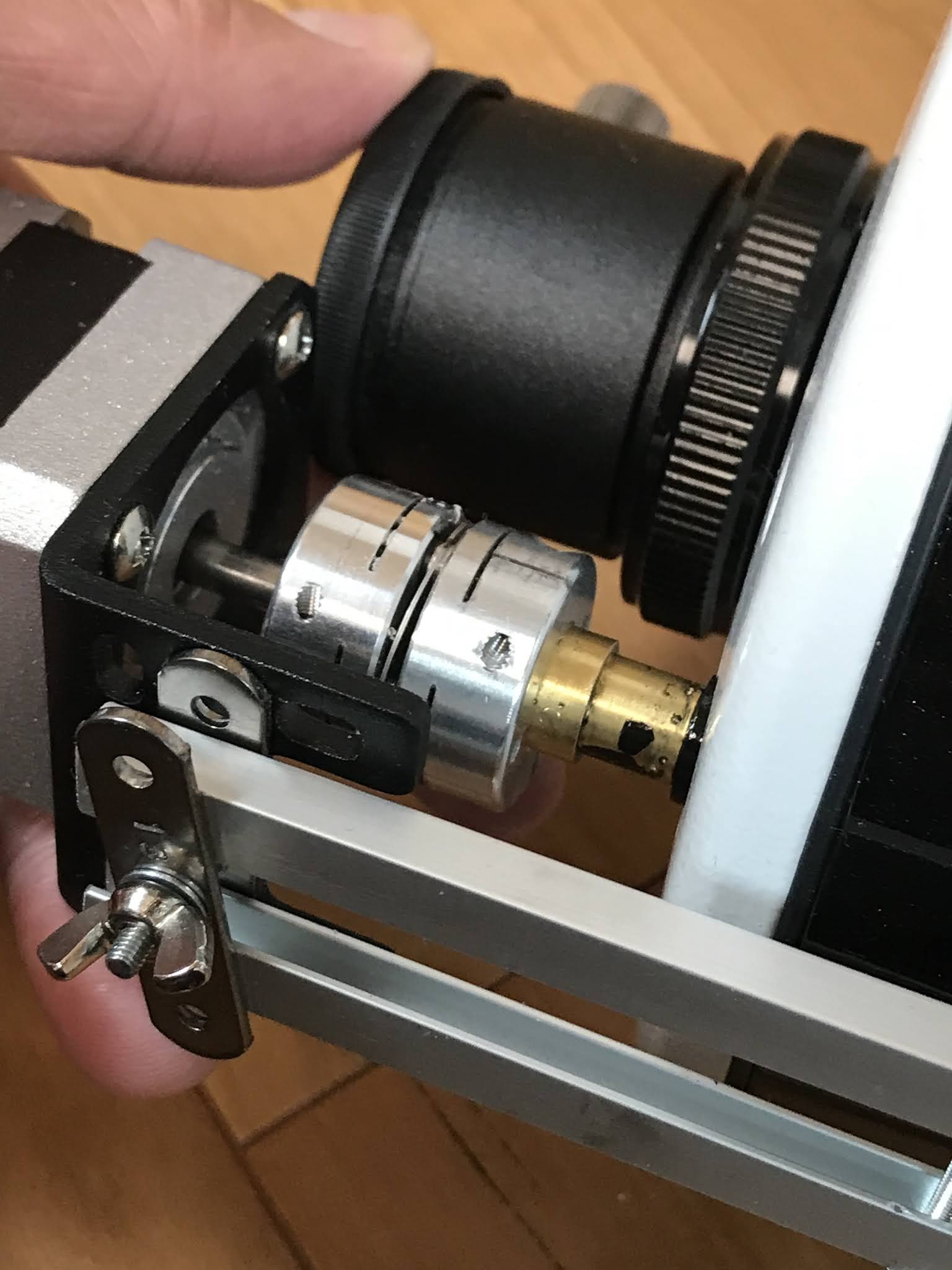
モータにブラケットを軽く取り付け(位置決めの後閉めます)、ブラケットに高さを合わせるための「ミニ金具フラット」を取り付けます。ミニ金具を取り付ける3x20mmのネジは硬く締め付けて下さい。あとでここの先に蝶ナットでモータを押さえつけることになるのですが、3x20mm のネジが回ってしまうと蝶ナットが回しにくくなります。そしてカプラーを取り付けます。カプラーはモータの軸が飛び出ない程度に押し込みます。

- MAK127SP のフォーカスノブを外す
六角レンチを二箇所回すと外れます。オイルが付くので注意。
金色のフォーカスを調整する棒は MAK127SP の中に押し込めるのですが、入らないようにしっかり引っ張り出しておきます。
- ブラケットの位置を調整します
もう一枚のミニ金具フラットを使ってアルミチャンネルを軽く挟み、MAK127SP のフォーカスを調整する棒とカプラーがすんなり入るようにネジをキツく閉めていないブラケットとモータの位置を調整し、位置が決まったらブラケット取り付けネジをしっかり閉めます。ブラケットの位置だけで調整仕切れない場合はスペーサーなどを追加するか、ミニ金具フラット以外のスペーサーで調整します。この時棒が MAK127SP に入り込まないよう注意します。カプラーが多少の取り付け位置のズレを吸収しますが、モータと望遠鏡に負荷がかからないようここはなるべく丁寧に合わせます。
- フォーカス調整棒とカプラーの固定
調整棒が中に入り込まないよう何かで押さえながらカプラーを押し込み固定します。
- モータを固定する
モータを引っ張りながら蝶ナットを閉めてモータをアルミチャンネルに固定します。フォーカス調整棒が中に入ってしまうとピントを合わせきれなくなる場合があります。ピントが合わせられなくなったら棒がめり込んでいないか確認すると良いかもしれません。
ちなみにオルダムタイプのカプラーは動かしている時に分離してしまって棒が中に入ってしまうケースがあるため使えません。
- モータのケーブルの処理
モータケーブルは購入した時はカバーに覆われておらずバラバラになって扱いづらいので、写真にあるように100圴でも売っているようなスパイラルチューブなどでラッピングすると良いです。結構邪魔なので最初にまとめた方がいいかも。






モータードライバの取り付け
電子工作的な作業はここだけです。しかもほぼねじ止め作業。
材料
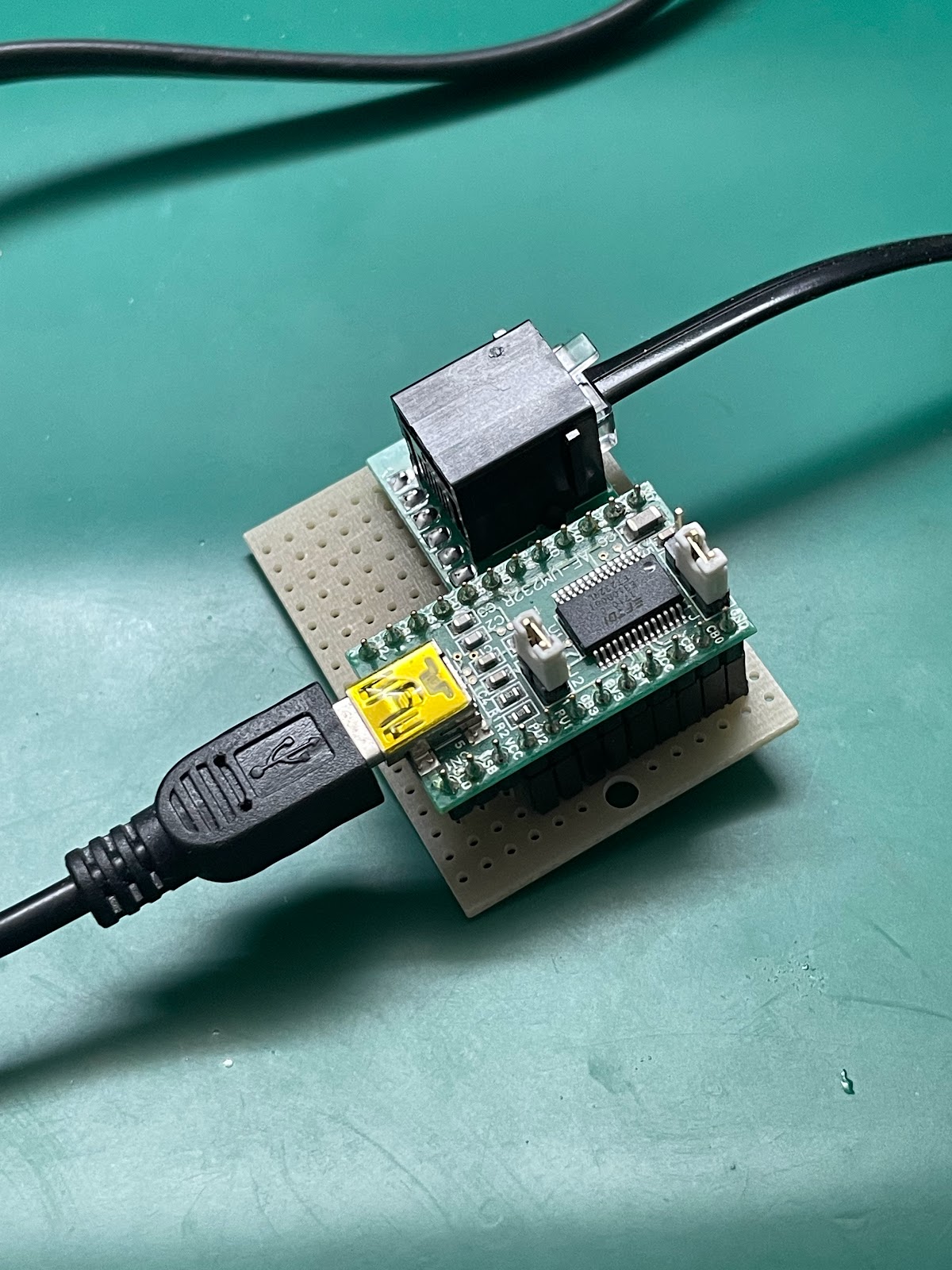
ATOMIC ステッピングモータードライバキットは今回の主役。これを使うと電子工作がほぼ不要になります。AC アダプターは 12V で、電流は 1A もあれば十分です。ATOMIC ステッピングモータードライバキットとしては 1.2A 流せますがそんなにいらないし、流しすぎるとモータがすごく熱くなります。モータが流す電流は後で調整出来るのでもっと電流値が大きいものでも問題ありません。DC ジャックケーブルは AC アダプターのジャックの径と合わせます。全部で2500円程度です。
ちなみにこれが ATOMIC ステッピングモータドライバキットの箱。小さいですよ。5cm角ぐらい。

作業
- ATOMIC ステッピングモータードライバキットをバラす
カバーは横を押しながら引っ張れば取れます。バラしたらディップスイッチがあるので後で設定変えやすいように、保護のビニールが貼ってあったら剥がします。
- DC ジャックケーブルなどの被覆を剥く
電子工作したことがなければ面倒に感じるかもしれませんが大した本数では無いのでカッターなどで被覆を剥いてしまいましょう。失敗したら切ってまたやり直せばいいですし。ただしワイヤーストリッパがあると凄く楽です。
- ケーブルを接続する
同じモータを入手した場合は写真を参考に繋いでください。ネジを回して締めるだけですね。DCジャックケーブルは秋月のだと白色がついてる方がプラスです。私はたまたま秋月が休みの時に秋葉原に買いに行ってしまいましたが、千石電商にミノムシクリップ付きのDCジャックケーブルがあってバラして使ってます。こちらもプラス側に白いマークありました。
他のモータを買った場合、配線の色が異なったり、そもそも配線が無い場合があります。そういう場合、配線図を見るなり、端子の記号を頼りに繋いでみてください。コイル二つのペアがあるのでそれぞれを A, B とし、コイルの両端を +/-と思って接続すれば良いです。最悪間違っても動かないだけか、逆に回るだけです。その場合は配線入れ替えてみて下さい。ただしDCジャックケーブルは間違うと壊す可能性があるので慎重に。




以上で工作的な物は終わりです。
送料は別として、全部で8000円、安いカプラーにすれば6000円ぐらいでしょうか。で、計算合ってる?コントローラーに PCを選択すれば追加で長めの USB-C ケーブルが欲しい程度で済みます。
また、コントローラの準備でモジュールの差し替えとかケーブルを挿す作業はありますがこれはコントローラーの選択のところで説明します。
材料と入手先
参考までに部品の入手先について。
秋月電子、スイッチサイエンス、千石電商、マルツエレック等で入手できるもの
- バイポーラステッピングモーター
- ステッピングモーター用ブラケット
- スイッチングACアダプター12V1A
- DCジャック付きケーブル
- ATOMIC ステッピングモータードライバキット
など電子工作に関する物。
ショップによって扱ってる物が違ったりします。
ホームセンター、モノタロウなどで入手できるもの
- アルミチャンネル
- M3蝶ナット
- M3六角ナット
- M3ネジ
- ミニ金具フラット
- カプラー
モノタロウが個人でも利用出来るようになったので、ホームセンターに行かないと入手しにくかった物が簡単に手に入るようになりましたね。