周辺の歪みはかなり解消されました。ただ倍率同じぐらいかなと思ったんだけど、大きくなっちゃってますね。バローレンズの余計な光学特性やら、やっぱりケラれる周辺や経緯台による回転のこと考えると直焦でもう少し小さく撮ってももいいのかな。あと前回の条件調べずに ISO 感度とか露出時間決めたのだけど、ISO感度下げてもう少し露出時間伸ばした方がよかったかも。
また、エンコーダにはプッシュボタンが組み込まれていて、これを押すと Fine モードの切替ができます。分解能1/4 に設定していればFineモードではエンコーダの1クリックが360/200/4=0.45°です。200x4=800クリックで一周。つまりエンコーダを40回転させないとフォーカスノブは一周しないと。エンコーダのボタンをもう一度押すと元に戻ります。
バーティノフマスクなんて持っていないので、ピントの山に迷った時、先ほどマークした二箇所をピントの山に対して同じ距離離れたところと仮定した場合に、真ん中の Center ボタンを押すと、Fine モードに移行して、マークした真ん中にピントノブが移動します。例えばピントの山の両脇のぼやけかたが似ている箇所をマークするとか、クレーターの小さな点が消えるところを両端にするとか。そんな使い方で。
最初に ATOM lite がつながっている COM ポートを選択して Open ボタンを押す以外はほぼ似たような操作です。ただ回すだけですし。マウスホイールでフォーカスノブが回るように作られているので、ホイール付きのマウスまたは、ホイールの動作が模擬できるトラックパッド及その設定が必要です。ちなみに Mark 機能の実装はサボっています(めんどくさかっただけ。実装が複雑という訳でも無いのですが)。
さて、写真にあるように3種類のコントローラがあります。左から M5Stack に PLUS エンコーダモジュールをつけた物、M5Stack Faces にエンコーダパネルをつけた物、そして Python で作った PC 版。どれもほぼ似たような操作感と機能(ただ回すだけですが。。)です。操作感が一番良いのが Faces にエンコーダをつけた物。左の PLUS エンコーダは昔懐かし?ジョグダイヤルとPCはちょっと微妙。です。
PC から初めてみて、PLUS エンコーダ、Faces エンコーダパネルと順々にステップアップしてみるという方法もあります。ここでは PLUS エンコーダ、Faces エンコーダパネルの選び方について説明します。PC についてはソフトウェア編で解説します。
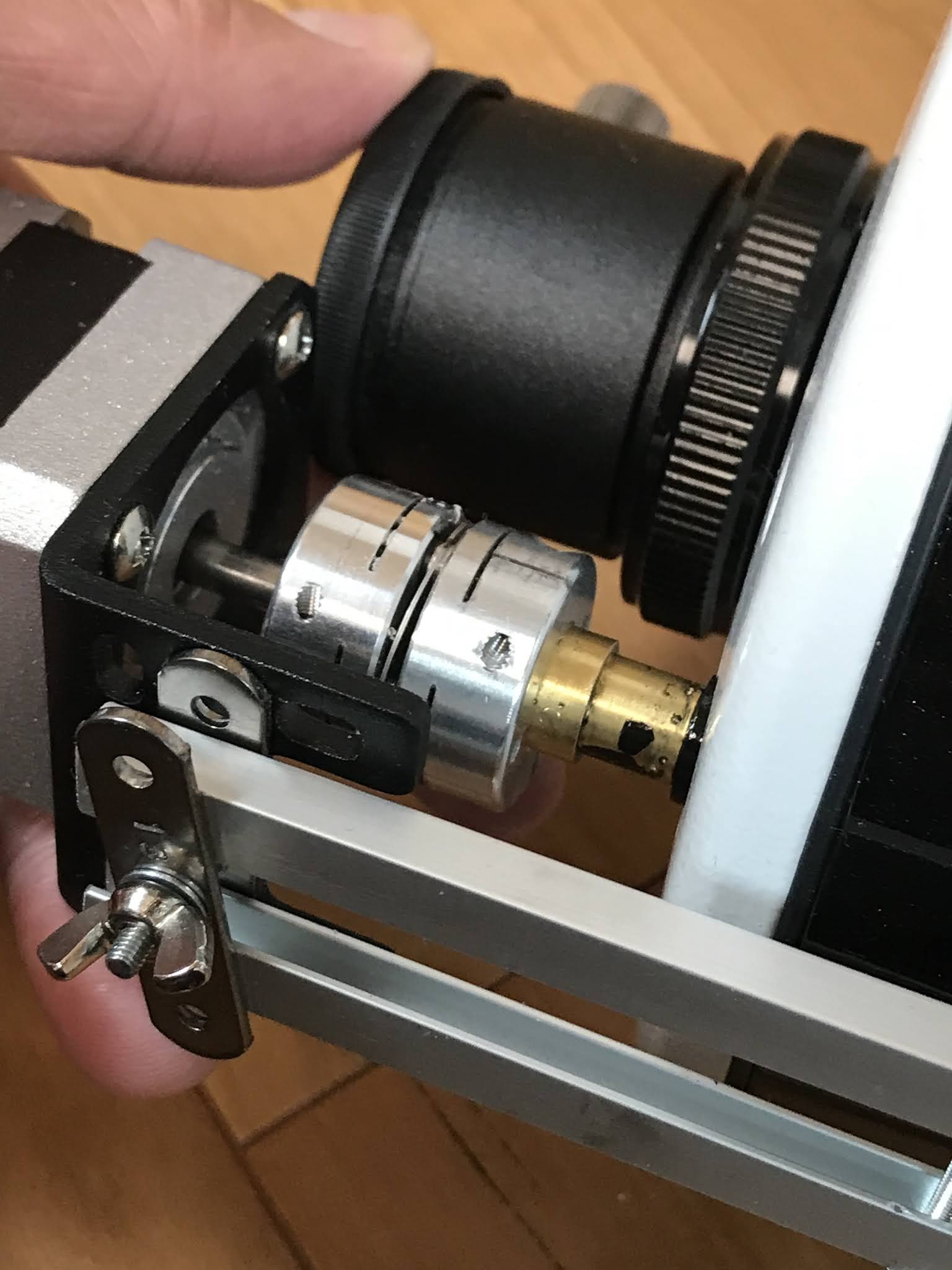
他のモータを買った場合、配線の色が異なったり、そもそも配線が無い場合があります。そういう場合、配線図を見るなり、端子の記号を頼りに繋いでみてください。コイル二つのペアがあるのでそれぞれを A, B とし、コイルの両端を +/-と思って接続すれば良いです。最悪間違っても動かないだけか、逆に回るだけです。その場合は配線入れ替えてみて下さい。ただしDCジャックケーブルは間違うと壊す可能性があるので慎重に。
NO WARRANTY (無保証)ですが、制作方法とソフトを公開していきますのでよかったら試してみてください。MAK127SP 向けとタイトルには書いていますが、モータさえ取り付けられれば他の望遠鏡にも適用できるのではないかと思います。DRV8825 を使用したフォーカサーの作例はボチボチ見かけますね。
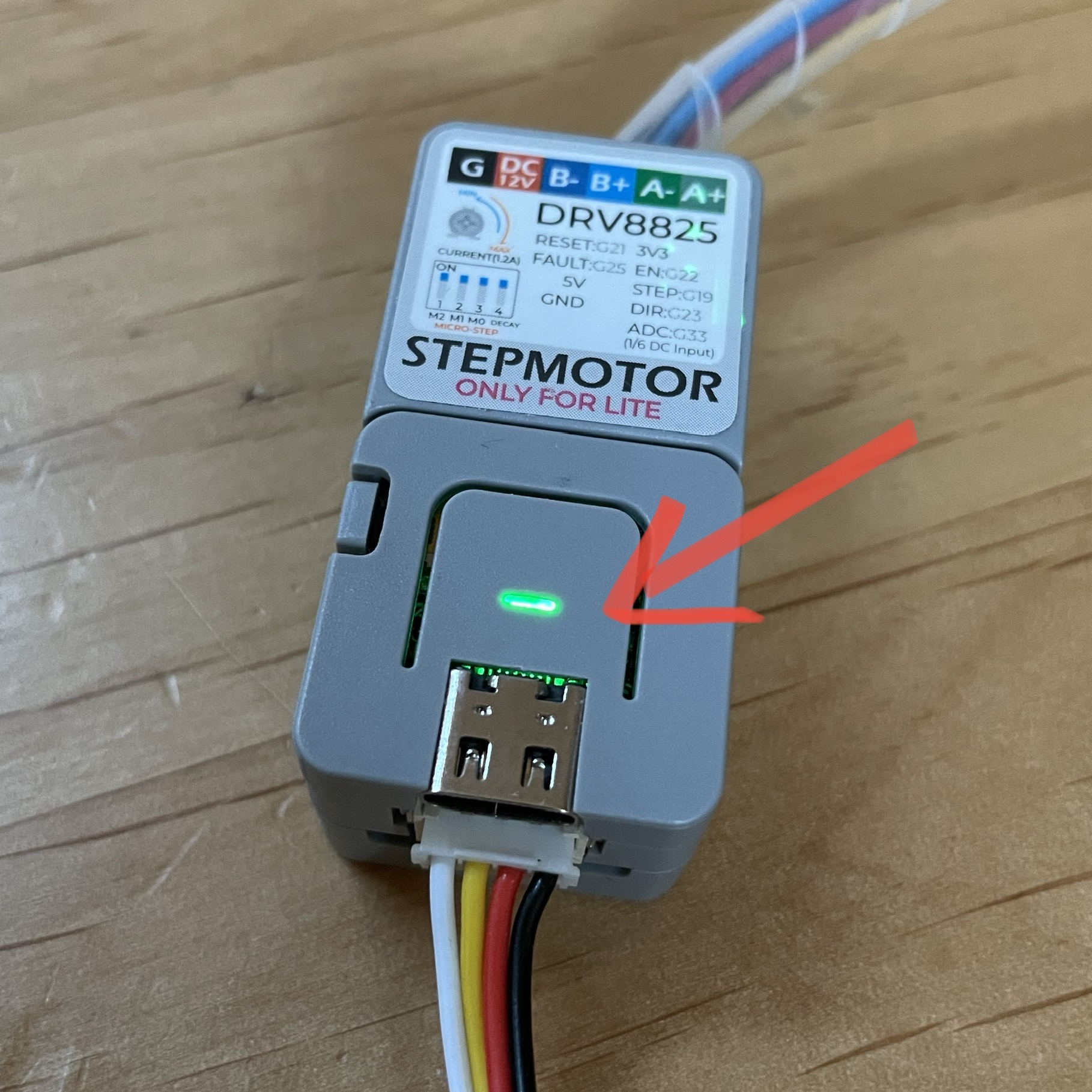
メインのシステム構成は望遠鏡 (MAK127SP) + ステッピングモータ + ATOMIC ステッピングモータードライバキット+コントローラです。ATOMIC ステッピングモータードライバキットは、M5Stack 社の ATOM lite に TI 社の DRV8825 が付いたモジュールで、ATOM lite にステップパルスの生成とコマンド受信を担ってもらっています。
生成パルス数と方向のコマンドを受信すると、ステッピングモータを動作させるという仕組みです。
コマンドは Grove 端子の I2C Slave 接続と USB ケーブルからの USB-serial の二系統をサポートします。
USB micro のコネクターがもげる事態が発生しました!スズメッキ線で補強したので、ほぼほぼ基板側のコネクタは大丈夫だと思います。ケーブル側のコネクタも補強しておきたいので、そのうち3Dプリンタで筐体作ろうかと目論んでます。製品版はType-B のごっついコネクタなんで、こういうことは起こりにくいんだろうなと思います。